Overview
This project focused on building a simple writing robot that could follow digital paths with stable pen pressure. I worked on the mechanical layout, printed parts, calibration, and motion testing.
What I Built
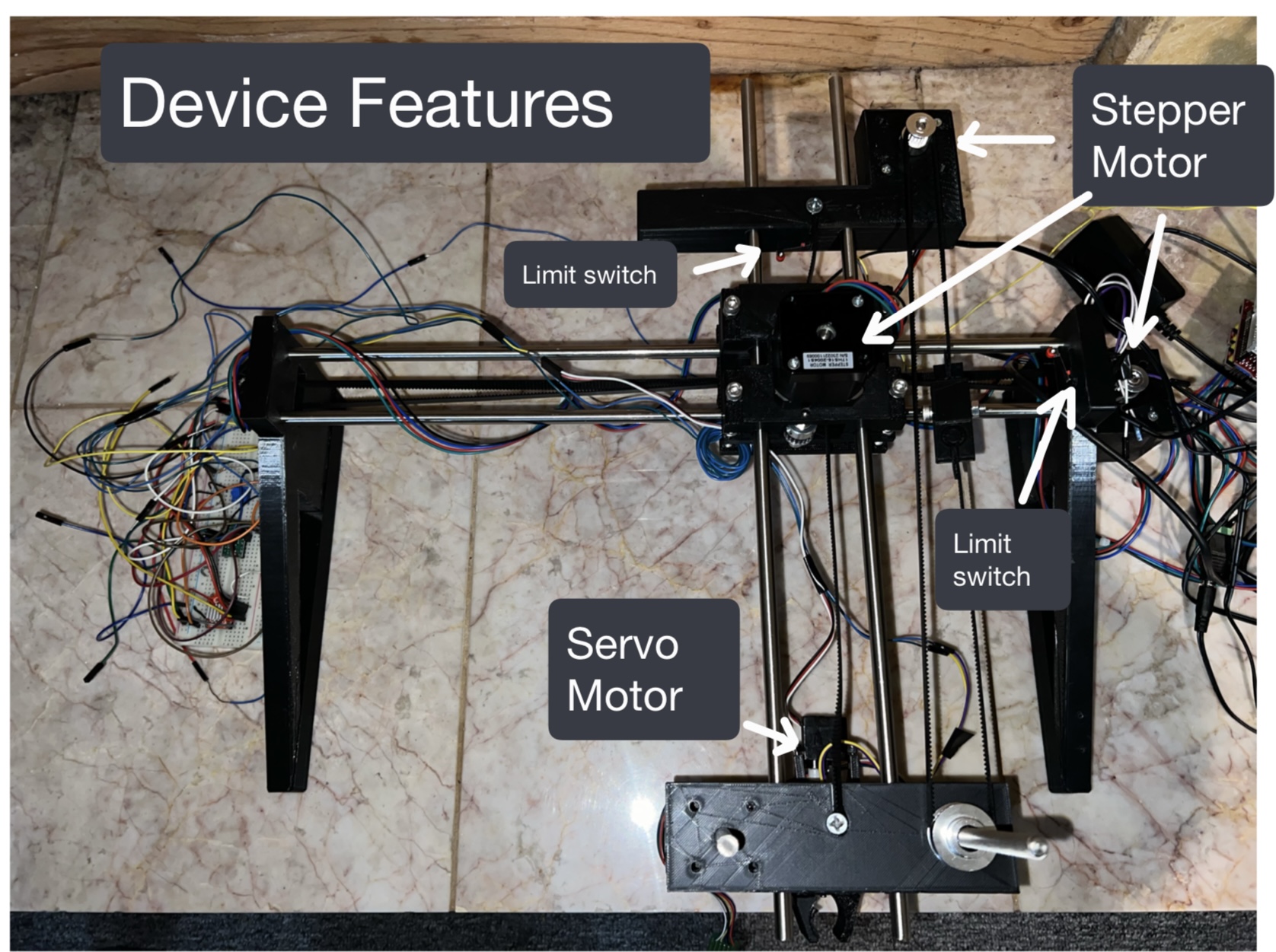
- Two-axis gantry for controlled X-Y motion.
- 3D-printed carriage and pen-holder components.
- Spring-loaded pen contact for smoother writing.
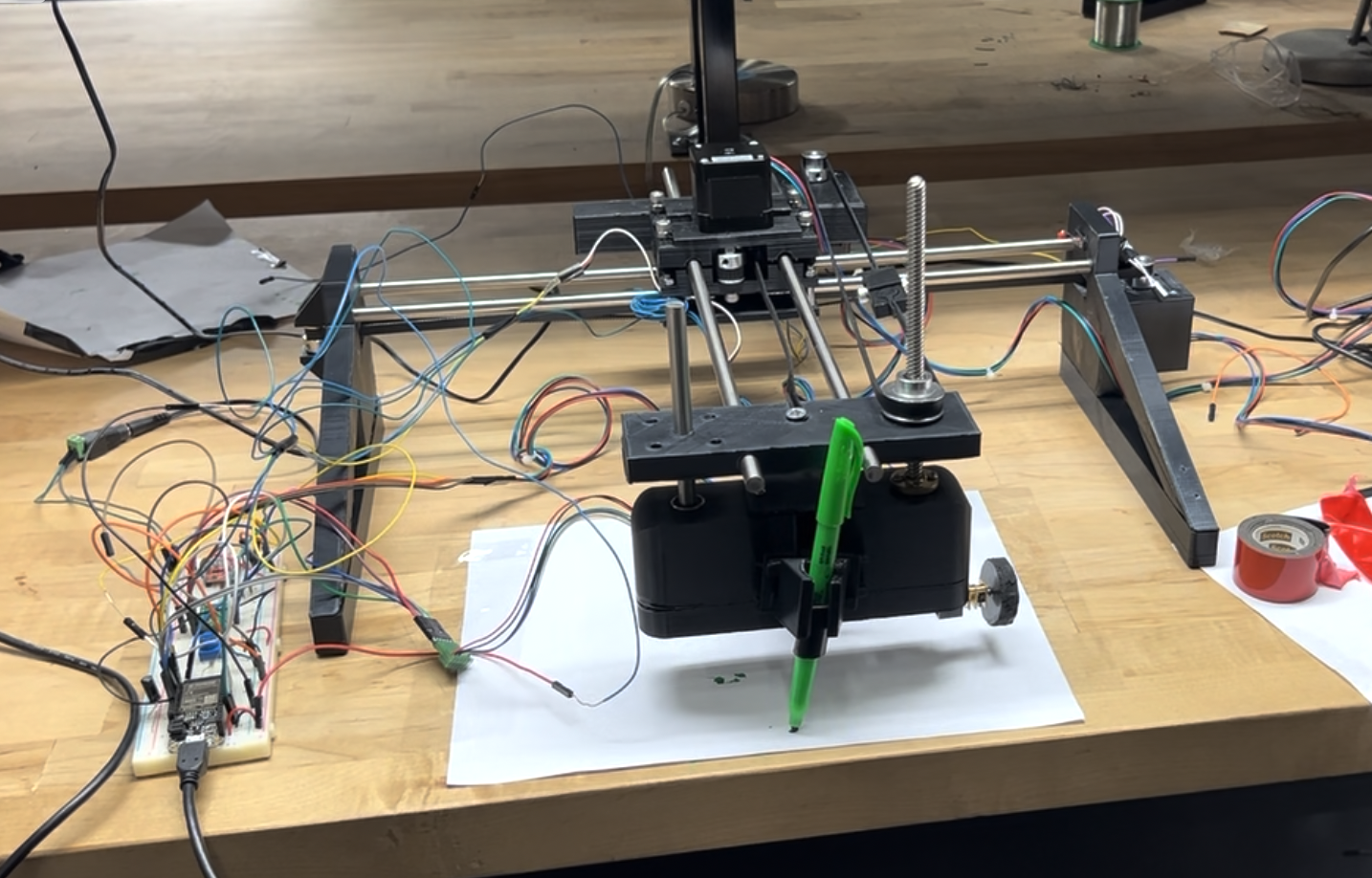
- Path testing using generated drawing and lettering files.
Design Notes
- Adjusted belt tension to reduce inconsistent movement.
- Calibrated steps/mm using a print-measure-update loop.
- Reduced backlash through mechanical tuning and path cleanup.
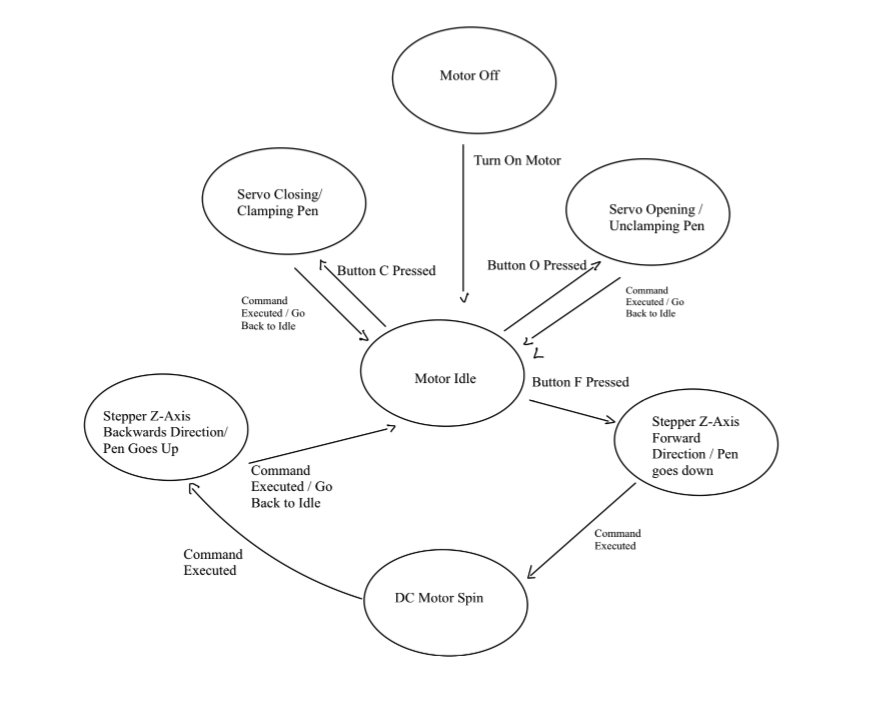
- Streamed paths over serial for repeatable test runs.
Key Takeaway
The project showed how small mechanical issues like backlash, belt tension, and pen pressure can strongly affect output quality. The final system produced cleaner, more repeatable drawing paths after calibration and mechanical tuning.